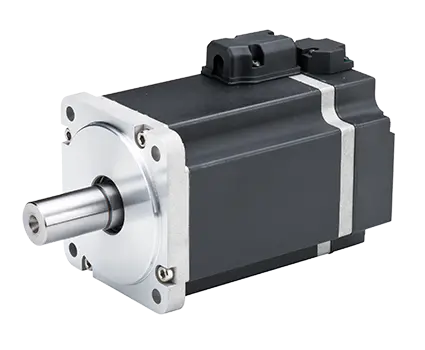
HIWIN EM1
Hiwinin kehittämä uusi EM1-servomoottori soveltuu moniin automaatiokohteisiin mm. puolijohde-, laserleikkaus-, piirilevy-, elektroniikka-, energia, mittaus/tarkistus- ja autoteollisuuteen. Verrattuna edellisen sukupolven FR-sarjaan, EM1-moottori tarjoaa suuremman nopeuden ja enkooderin resoluution sekä kompaktimman koon. Yhdessä uuden E1-sarjan vahvistimen kanssa moottori tarjoaa nopean asettumisajan ja stabiilisuuden, parantaen samalla tuotantotehokkuutta.
Lue lisää
YASKAWA Sigma X
Sigma-X-servomoottorit kattavat laajan tehoalueen, alkaen 50 watista ja ulottuen aina 15 kilowattiin. Tämä mahdollistaa niiden käytön monenlaisissa sovelluksissa, kuten pakkaus-, robotiikka- ja työstökoneissa. Moottorien laaja toiminta-alue yhdistettynä kompaktiin kokoon tekee niistä erinomaisen valinnan sekä uusien järjestelmien suunnitteluun että vanhojen järjestelmien modernisointiin.
Järjestelmä on tällä hetkellä saatavilla 200 V -jännitteellä ja tehoalueella 50 W – 15 kW. 400 V -mallit tulevat markkinoille lähitulevaisuudessa. Nyt on myös saatavilla servovahvistimia, jotka mahdollistavat jopa kolmen servomoottorin yhtäaikaisen kytkennän.
Lue lisää
